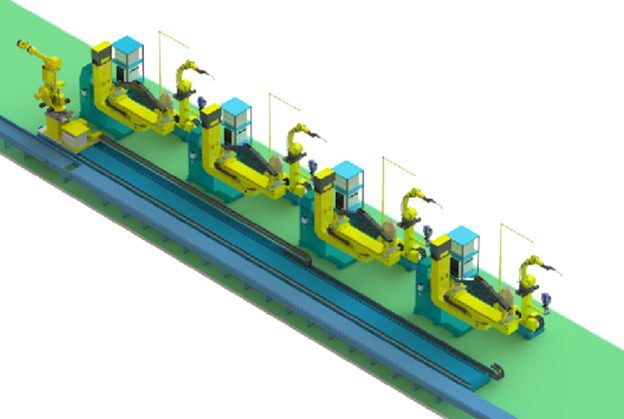
工作站主體上采用三軸聯動行走:X\Y\Z帶動機器人加L型兩軸變位機來配合完成焊接任務,將L型變位機翻轉軸、旋轉軸作為機器人的外部附加軸進行控制。
通過變位機與機器人在焊接過程中的協調運動,可將任何一段可焊接焊縫轉到合適的焊接位置,并由機器人帶動焊槍以合適的焊接姿態完成焊接。
掃碼關注微信

.png)