.png)


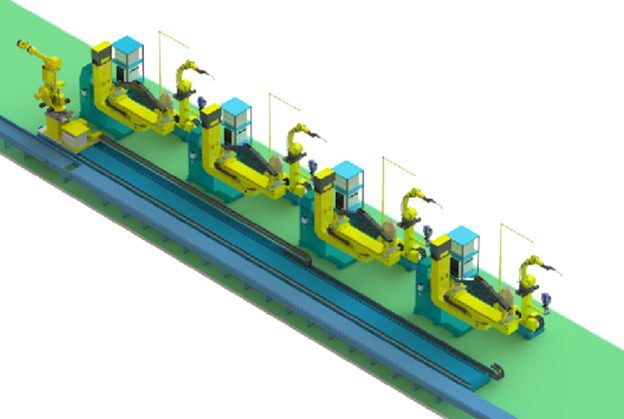
風力發電支架焊接機器人工作站主要由兩臺兩軸龍門行走機構、兩臺機器人、兩套焊接設備、一臺 L 型兩軸伺服聯動變位機以及其余周邊設備構成。
三軸龍門行走機構、L 型變位機的翻轉軸和旋轉軸均作為機器人的外部附加軸進行伺服聯動控制。較之于非聯動控制,上述控制方式使得設備具有定位精準、運動平穩等優點。
高精度的齒輪、齒條和良好的潤滑使得龍門外部行走機構具有長壽命使用的特點;L 型變位機采用伺服電機、RV 減速機和齒輪傳動機構,合理的元件選型以及高等級的元件精度使得該變位機具有定位精準、驅動扭矩大等優點。
通過六軸機器人、三軸龍門行走機構以及兩軸 L 型變位機配合使用,使得該機器人工作系統有較大的工作范圍和良好的系統柔性,即使大型復雜工件上可達性不好的空間焊縫,也可輕松勝任!