.png)


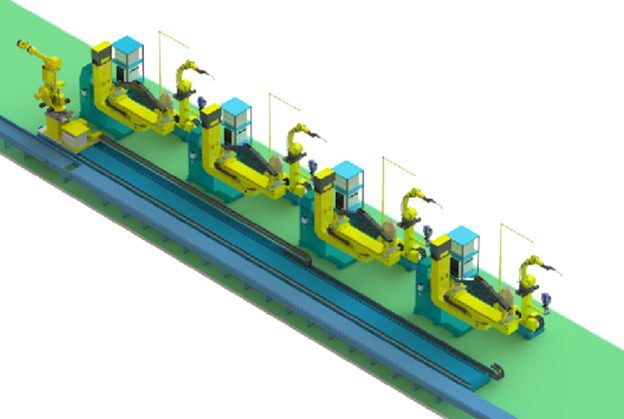
裝載機鏟斗焊接機器人工作站
裝載機鏟斗焊接機器人工作站,采用11軸聯(lián)動機器人焊接系統(tǒng)。這種工作站的設(shè)計不僅優(yōu)化了空間利用,還顯著提高了生產(chǎn)效率和焊接質(zhì)量。
以下是該工作站的關(guān)鍵技術(shù)和優(yōu)勢:
1.11軸聯(lián)動機器人焊接系統(tǒng):機器人本體通常具有6個自由度(軸),而額外的5軸聯(lián)動來自于變位機和工件定位機構(gòu)。這種高自由度的設(shè)計使得機器人能夠**地調(diào)整姿態(tài)和位置,以達到**的焊接角度和路徑,從而提高焊接質(zhì)量和效率。
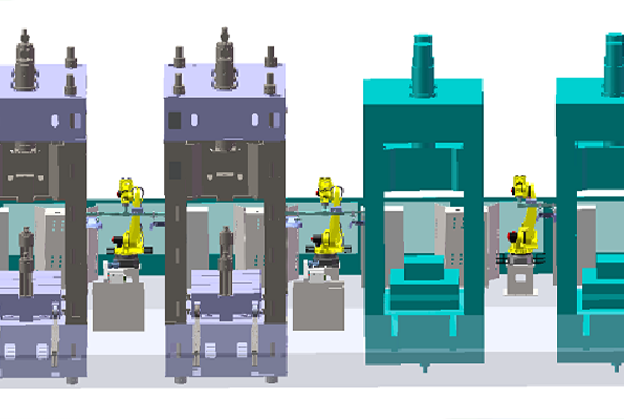
2. 機器人變位機移動裝置一體式結(jié)構(gòu):這種設(shè)計將機器人和變位機緊密結(jié)合,不僅節(jié)省了空間,還提高了系統(tǒng)的靈活性。一體式的結(jié)構(gòu)使得機器人能夠在X、Y、Z三個方向上自由移動,同時通過變位機實現(xiàn)工件在空間上的多角度定位,使得機器人能夠覆蓋更大的作業(yè)區(qū)域,從而提高焊接的可達性和精度。
3. 創(chuàng)新的C型變位機設(shè)計:C型變位機能夠在工件周圍進行連續(xù)轉(zhuǎn)動,使得機器人能夠從不同角度接近工件,實現(xiàn)連續(xù)焊接。這種設(shè)計提高了焊接過程的連續(xù)性和一致性,從而提高了焊接質(zhì)量。
4. 柔性的工裝夾具:工作站采用了柔性的工裝夾具設(shè)計,能夠適應(yīng)不同尺寸和形狀的鏟斗工件,減少了更換工裝夾具的時間,提高了生產(chǎn)效率。這種夾具能夠自動調(diào)整工件的位置,以抵消焊接過程中產(chǎn)生的變形,確保焊接后的工件尺寸準確無誤。
5. 操作簡便與生產(chǎn)效率:獨特的夾具設(shè)計和自動化的控制系統(tǒng)使得操作人員可以輕松地裝載和卸載工件,減少了準備時間,提高了生產(chǎn)效率。同時,11軸聯(lián)動的配置使得機器人能夠靈活適應(yīng)不同尺寸和形狀的工件,進一步提升了工作站的柔性。
6. 焊接質(zhì)量的穩(wěn)定性:工作站通過**的傳感器和自適應(yīng)控制算法,能夠?qū)崟r監(jiān)測和調(diào)整焊接參數(shù),以補償工件的誤差,確保即使在工件存在輕微變形或位置偏差的情況下,也能獲得一致的焊接質(zhì)量。
7. 系統(tǒng)柔性與生產(chǎn)效率:11軸聯(lián)動的設(shè)計,加上自動化的傳感器和夾具,使得工作站能夠處理不同尺寸和形狀的鏟斗工件,減少了更換工裝夾具的時間,提高了生產(chǎn)效率和系統(tǒng)的柔性,適合于多品種、小批量的生產(chǎn)模式。
綜上所述,裝載機鏟斗焊接機器人工作站通過采用11軸聯(lián)動機器人焊接系統(tǒng)和創(chuàng)新的C型變位機一體式設(shè)計,不僅優(yōu)化了空間利用,還提高了焊接質(zhì)量和生產(chǎn)效率,為裝載機鏟斗等結(jié)構(gòu)件的焊接提供了高效、可靠和靈活的解決方案。





掃碼關(guān)注微信

閉.png)